


電子報
每當豪雨颱風侵襲臺灣,其極端降雨型態常使得山區土石流潛勢溪流集水區發生土石流災害,並且山區道路與橋樑也時常遭受土石流與坡地崩塌災害等的威脅。因此,對基層防災人員災後的現地調查,包含正射影像建置、既有構造物調查、重要保全對象調查、河道粒徑量測及地形建模等,已成為後續工程設計或防災規劃上重要參據。然傳統三維地形模型建置需仰賴高階雷射掃描儀器與繁複的後製流程,其產製成果精度雖高,但需花費大量後處理時間,其不利於災害應變與現場即時情資需求應用。針對災後緊急勘查需求而言,主要考量儀器攜帶便利性、情資傳遞快速性及操作門檻低易上手性等,是以智慧型手機逐漸成為防災現場調查的有效輔助工具。本期電子報將介紹三種不同方法應用於現地調查,並以河道粒徑量測為案例,說明比較其量測誤差狀況,將有助提升防災人員於災後調查效率與情資供應能力。

在進行現地河床質粒徑分析作業時,筆者依水土保持技術規範第37條簡要說明,河床質粒徑分析分為採樣孔粒徑調查分析及表面粒徑調查分析二種。採樣孔需要於現地挖取至少1m × 1m × 0.6m 以上之樣坑,野外粗顆粒篩分後帶回實驗室進行細粒徑分析,依各粒徑分別算出其停留百分率及通過百分率,最終繪製出粒徑分佈圖,相當費時費力。

而表面粒徑調查在法規層面上,分為以下三個細項:
1. 每五百公尺至少取一處為調查之主斷面,再於主斷面上、下游每間距十公尺,另取二個副斷面,合計共五個斷面。
2. 每一個斷面以等間隔(或整數距離)之測點,量測在該測點上之泥砂粒徑,每一個斷面以不少於五個測點,測點之間隔不得超過五公尺。
3. 每一測點量測十公分以上之粒徑,依統計資料繪製粒徑分佈曲線圖。
隨著生成式AI與雲端運算的普及化,近年手機建模技術已成為現場紀錄的新興工具,其擁有操作簡易、設備普及且能補足空拍受樹木遮蔽、死角等優點。本次電子報以嘉義縣中埔鄉 土石流潛勢溪流-嘉縣DF051 區域為研究對象,但受限於拍攝範圍小與部分現地地形拍攝危險性高等限制,僅以人員可及之河道為試驗區,檢測標註33顆不同大小之石頭後,以三種不同的量測方式進行數據差異比較:
1.直接測量法,於現地用魯班尺直接測量長軸,如圖3。
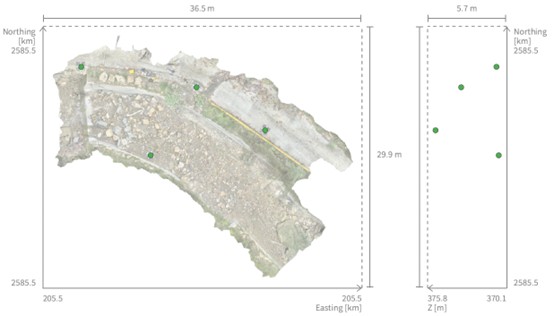
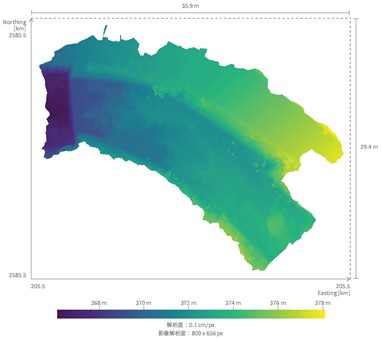
2.利用viDoc RTK(如圖4)搭配具有LiDAR功能的iPhone 16Pro智慧型手機進行現地三維掃描後,將點雲輸入PIX4Dmatic軟體,搭配RTK量測四處控制點,進行三維模型建置並量測其粒徑,成果如圖5~7。
3.進行研究區域的UAV正射影像建置,並將影像直接存入手機中,利用polycam軟體進行三維模型建立,如圖8~9。





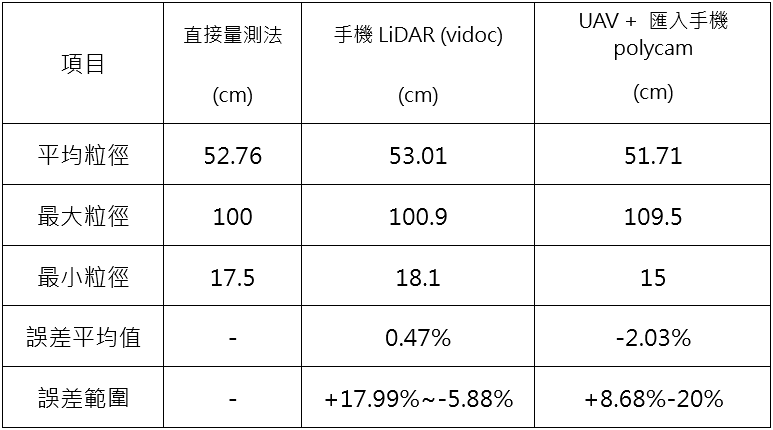
本研究以誤差計算以直接量測法為比對基準值,再經由三者方法進行比對之後,可以發現搭載LiDAR的iphone 16 pro搭配上vidoc並使用PIX4Dmatic軟體建模,其誤差平均值為0.47%,河床質粒徑誤差範圍為+17.99%~-5.88%之間,而將UAV拍攝之影像儲存在手機上,並用polycam軟體進行建模及3D校正時,其誤差平均值為-2.03%,河床質粒徑誤差範圍為+8.68~-20%之間,如表1。
可以發現用手機LiDAR (vidoc)建置模型完整度相當高,細緻度上也相當良好,不太會有破圖的情形發生,但整體所花費的時間較長,從拍攝到成果展現,需要的作業時間約為一天。而利用UAV拍攝後手機建立之模型完整度較低,略有破圖情形發生,且有三個粒徑是無法進行粒徑辨識的,但其優點就是作業時間較相當快速,從拍攝到成果展現僅約花費1個小時,將有助提升防災人員於災後調查效率。
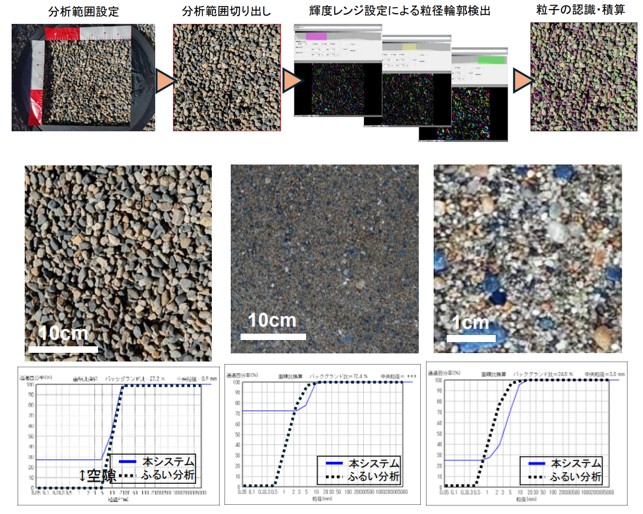
BASEGRAIN 是由瑞士蘇黎世聯邦理工學院水利、水文及冰河工程實驗室開發的一套影像判釋軟體,是以 MATLAB 為基礎的自動目標檢測軟體,可以針對俯視影像進行表面粒徑分析,其相關操作流程如圖10(陳祥偉等,2023)。各項研究雖然對於BASEGRAIN 的判釋精度與應用效果略有不同見解,但普遍都認同影像辨識過程中的「閾值設定」為影響結果的關鍵環節,需依據實際環境進行適當率定(詳圖11),其影像辨識的粒徑大小不宜過低,且有小粒徑判釋偏小,大粒徑判釋偏大的跡象(陳祥偉等,2023)。

![圖11、確認灰度閾值乘數(facgrayhr1)以及分水嶺橋最小允許長度(areaCutWW[px]),對於影像判釋結果的影響最為明顯(陳祥偉等,2023)](/Content/EPaper/af5d305f-bb4f-485f-8159-5c47f36d9bc5/RDTAj圖片11.jpg)
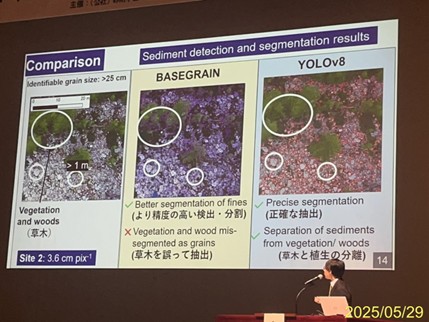
此外,搭著AI的浪潮,以2025年日本砂防學會的長野大會發表論文為例,表面粒徑判釋與AI學習相關研究亦發展出多種不同方法(詳圖12、圖13),其不外乎都期望取代傳統仰賴大量人力與時間的調查方式,同時也有助於降低現地作業可能面臨的潛在風險,提升效率與安全性。
傳統的河床粒徑調查需耗費大量人力與時間,且存在一定的現場風險,利用手機建立模型,除了操作門檻較低,也可以補足UAV容易因樹木遮蔽或天氣狀況不佳無法飛行等優點,但不可忽略的是手機拍攝範圍遠不如UAV的範圍廣範,對於中大型地形建模仍有距離限制。現地人員調查時仰賴於手機建模具備即時性與操作便利性,可有效補足 UAV 空拍的視角限制,未來若能與自動化分析工具結合,有助提升災後調查效率與資訊成果供應能力。
1.逢甲大學營建及防災研究中心。
2.電子報第62期。
3.電子報第69期。
4.電子報第76期。
5.電子報第77期。
6.電子報第105期。
7.株式会社WorldLink & Company
8.株式会社WorldLink & Company
9.陳祥偉、賴東暘、詹錢登 ( 2023 ) 。應用UAV空拍影像和 BASEGRAIN 軟體分析河道泥沙粒徑分布之研究。土木水利,50 ( 5 ) ,78-90。
10.古木宏和、伊藤隆郭、倉上健、池島剛、孝子綸、図日本工営(株),関家史郎、山森一彦、荒木光一、五大開発株式会社 ( 2025 ) 。画像処理による簡易的粒径分布解析システムの開発。令和7年度砂防学会研究発表会。P-031,421-422 。
11.Samikshya Daha、Fumitoshi Imaizumi、Shoki Takayama、Tomoya Osada ( 2025 ) 。令和7年度砂防学会研究発表会。R1-015 ,61-62。