


坡地虛擬實境訓練平台開發
開發緣起
為重現重大土砂災區現場,讓災害現場可視化,本研究透過無人載具(Unmanned aerial vehicle, UAV)拍攝成果,以3D實景建模方式建置坡地三維空間模型,並於實景模型中匯入歷年調查規劃成果圖資資料,建置坡地虛擬實境空間展示及沉浸式訓練平台。VR是近年快速興起的新領域,透過訓練模式的開發可作為新進工程師專業能力輔助訓練平台,讓使用者毋需親臨現場也能瞭解現場狀況。此外,本研究開發成果並可讓多名使用者於VR虛擬空間中討論災害緊急處理方案或工程配置,跨越空間限制,提升防減災工作效能。
平台架構與功能
1
UAV攝影
取樣流程
UAV攝影
取樣流程
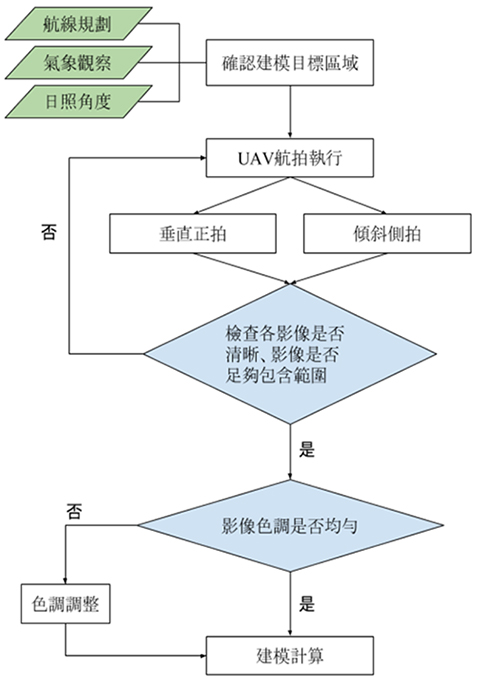

虛擬實境(Virtual reality, VR)技術藉由高重疊方式拍攝航拍影像,使用三維建模軟體ContextCapture處理連續高解析度航拍影像,將其資訊重建為三維模型,並透過Unity進行VR虛擬實境環境開發。
2
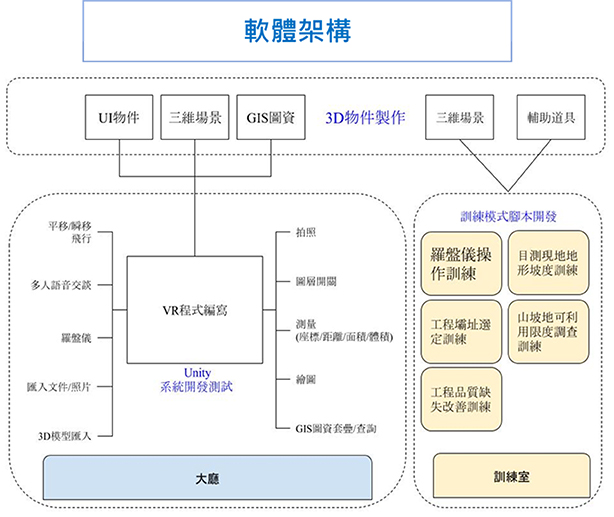
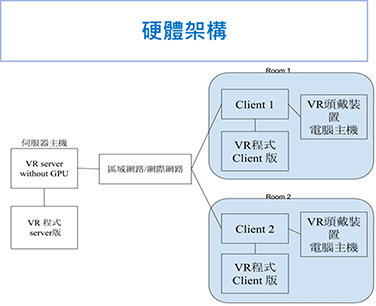
平台
架構
平台
架構
3
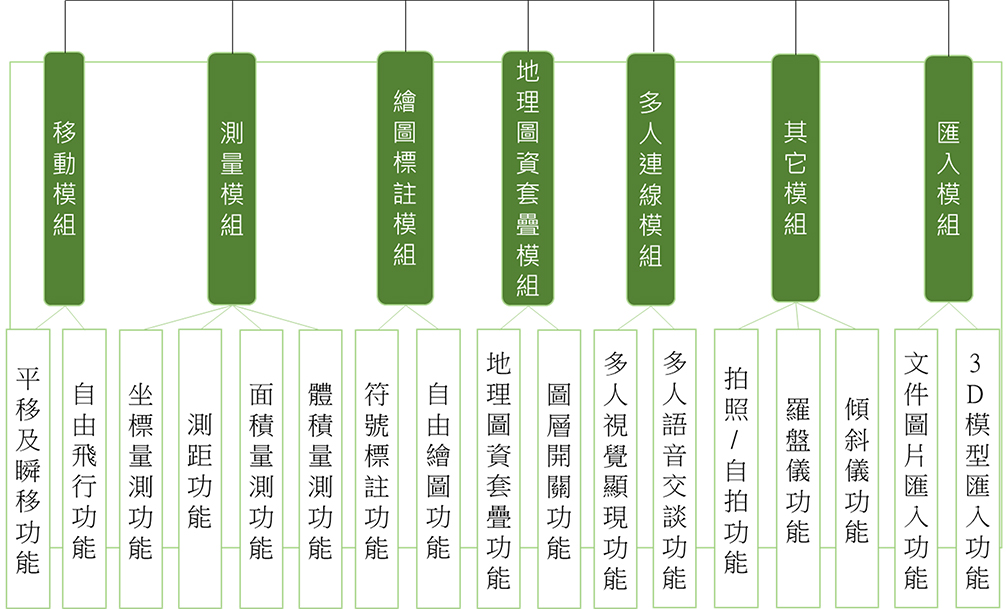
七大基礎
模組開發
七大基礎
模組開發
4
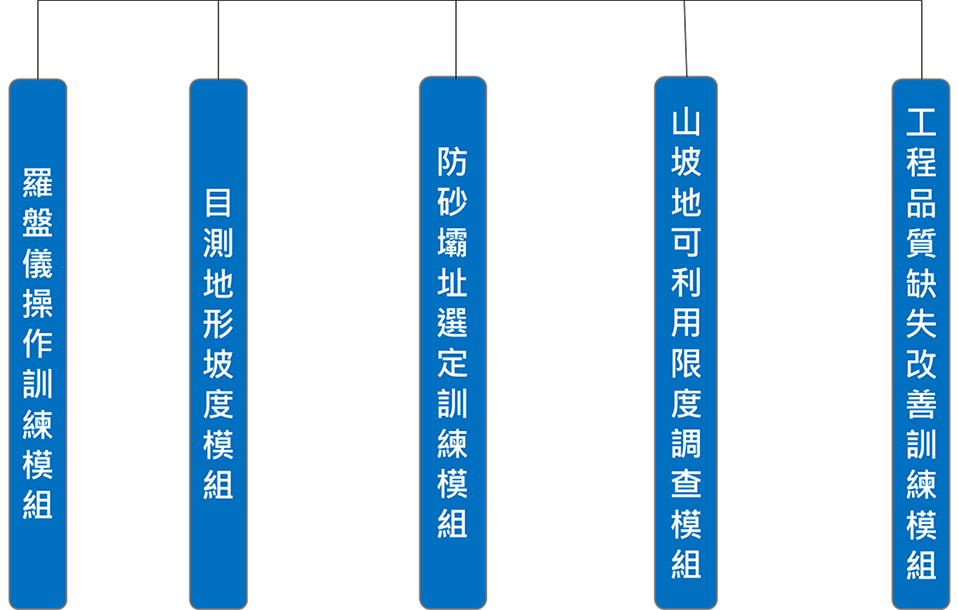
五大訓練
模組
五大訓練
模組
實作案例
工程品質缺失改善訓練
-
訓練目的
學習如何於工地辨別施工工項之優缺點。 -
訓練流程
進入訓練場景(野溪治理),入口處閱讀說明看板,手持控制器拿取缺失文件表,至場景施工區中尋找待查和工項。 -

目測現地地形坡度訓練
-
訓練目的
於場景中直接以目測方式來判斷地形坡度。 -
訓練流程
進入訓練場景後,於箭頭指定處,進行目測現地地形坡度,並於看板選擇使用者目測得知角度,選擇完畢按解答鍵顯示正確答案,至下一箭頭指定處進行下一關。 -

山坡地可利用現度調查訓練
-
訓練目的
學習如何進行山坡地可利用現度調查作業。 -
訓練流程
進入訓練場景,移動至待查定地,閱讀說明看板後即可開始進行查定流程。目前山坡地可利用限度查定係依據四項現地因子進行判定,包含: (1)坡度。(2)土壤深度(使用土鑽測定)。(3)土壤沖蝕深度。(4)母岩性質。 -

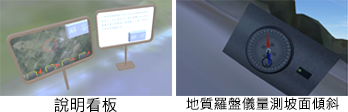
地質羅盤儀操作訓練
-
訓練目的
於VR場景中學習如何操作地質羅盤儀、判讀數據,並選擇正確的符號表示。 -
訓練流程
進入訓練場景後,初始位置位於需操作地質羅盤儀的附近,閱讀說明看板,至看板上所標示位置使用地質羅盤儀量測傾斜走向,量測完畢後,於看板地圖上選擇區選擇符號,選擇完後點擊解答鍵,顯示正確的傾斜走向符號。 -
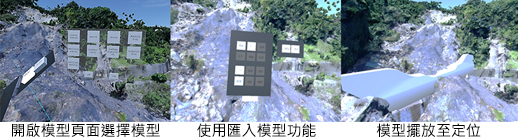
防砂壩址選定訓練
-
訓練目的
以武玄宮崩塌地為例,訓練使用者觀察其災後現況,研擬防災工程構造物應如何配置。 -
訓練流程
觀察災害場景,並已匯入模型功能將預設的防砂壩匯入擺放位置調整大小及方向,設置好模型並按下完成,回到看板按下解答鍵,出現預先設置好的規劃模型。 -
效益與展望
增加防救災成果之可視性及直觀性
- 利用實景建模展示真實現況
- 可在VR環境內1:1呈現
跨空間展示及討論防救災成果
- 即時網路VR連線
- 跨域討論工程方案
- 提升工作效益
沉浸式互動教育訓練
- 突破傳統教育訓練模式
- VR互動達到深刻學習目的