


電子報
電子報第120期談到InSAR技術的基礎背景知識,介紹了雷達衛星的各個波段與其適用的監測目標,以及D-InSAR與PS-InSAR這兩項常見的分析技術。本期電子報將進一步說明現有的研究成果,展示InSAR技術在坡地監測的應用,包含利用PS-InSAR與SBAS-InSAR技術呈現目標範圍的多時序位移,與可有效應用於崩塌預測的INV方法(Inverse Velocity method, INV)。
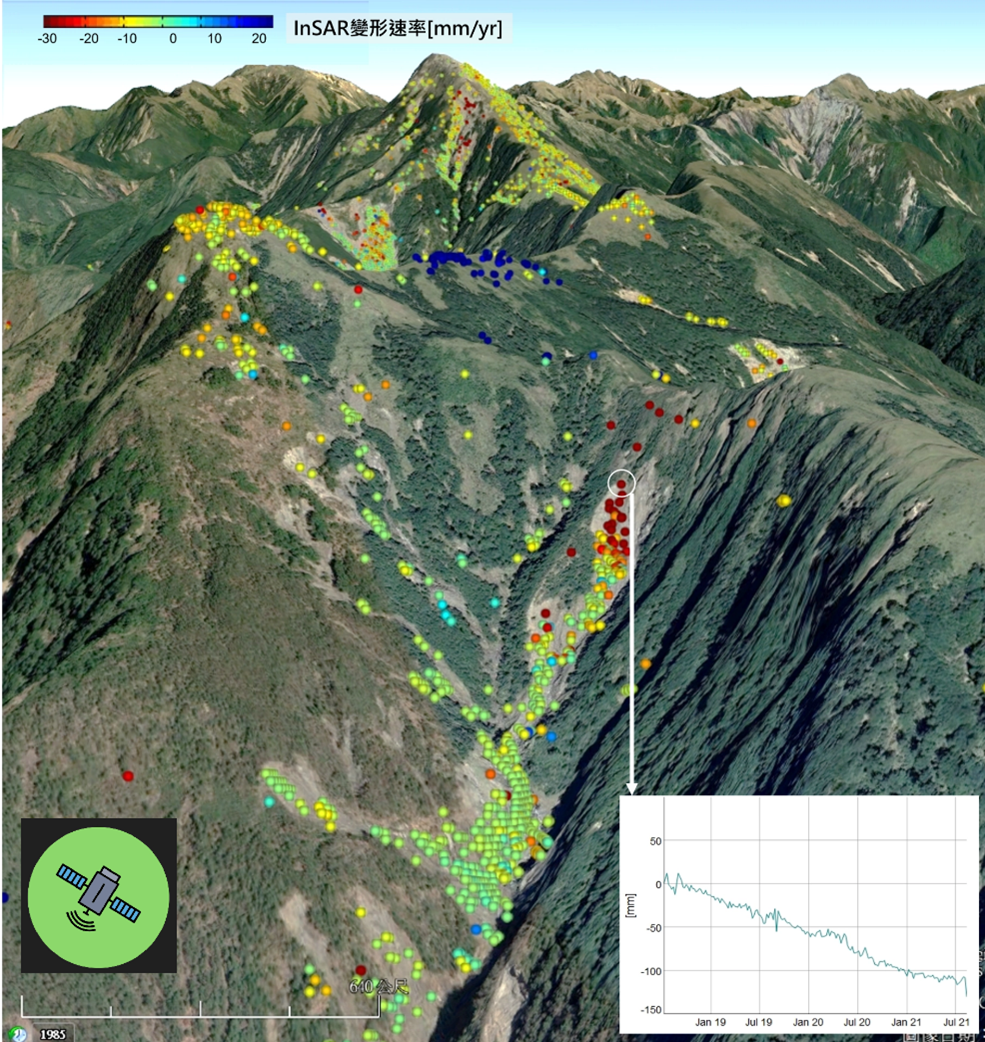
為掌握坡地的變形行為及大規模崩塌風險,需要有長時期的位移監測資料。相較於GPS/GNSS系統僅能提供單點資訊,且需至現地安裝儀器,InSAR可以提供更廣域的監測效果,也毋須人員到目標邊坡進行安裝與維護的工作。而目前MT-InSAR(Multi Temporal InSAR,多時域雷達干涉技術)就泛指透過分析多時期的雷達衛星影像,計算目標範圍內長時間變形行為的技術(圖1)。
常見多時域雷達干涉技術(MT-InSAR)包含了PS-InSAR(Persistent Scatterer-InSAR,永久散射體差分干涉)、SBAS-InSAR(Small BAseline Subset-InSAR,短基線集差分干涉)、TCP-InSAR(Temporarily Coherence Point-InSAR,時域相關點雷達干涉),以下內容將針對
首先,要執行PS-InSAR或SBAS-InSAR技術時,均需要一定數量、相同空間範圍、多時期拍攝的雷達影像,才能計算隨時間變化的變形量。其次,PS-InSAR分析的變形量,是與一特定基準點的主影像做對比,計算各時期影像和主影像間的PS點空間變化,得到多時序的變形量。
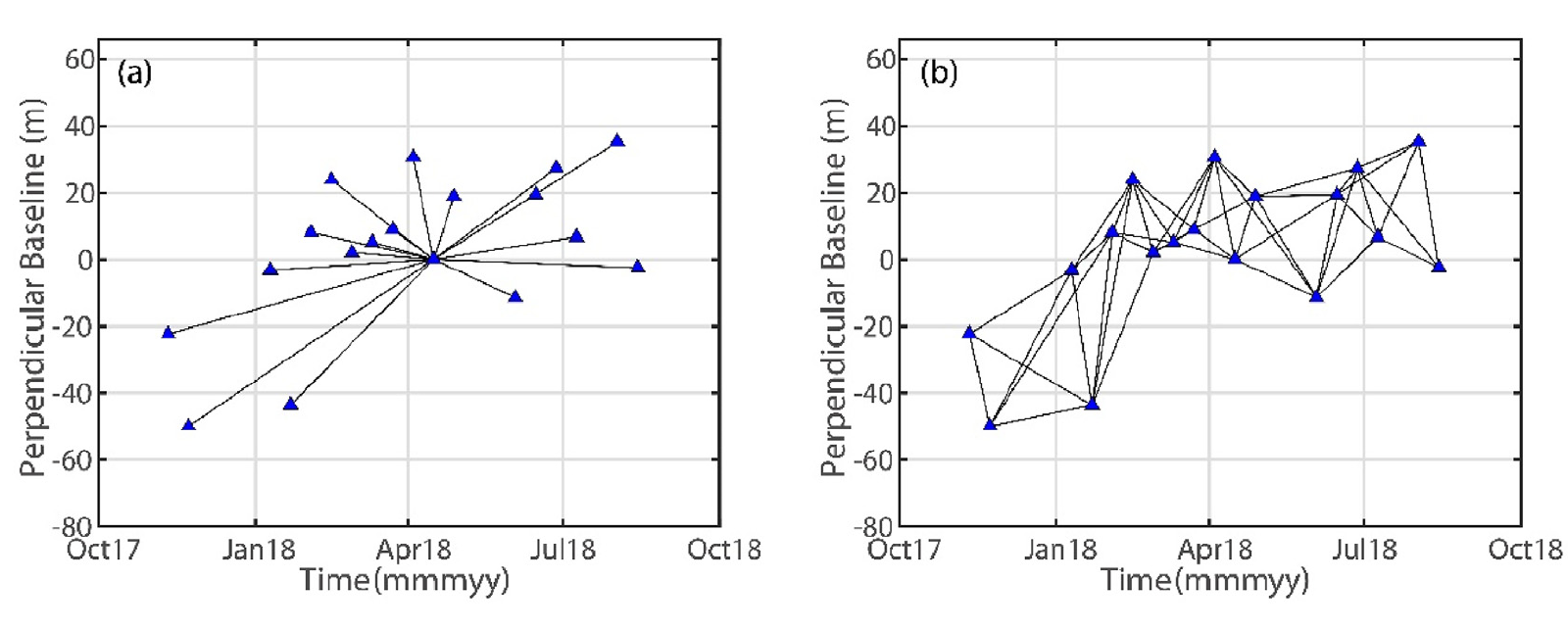
SBAS-InSAR則先分析並篩選出時間與空間上較為接近的影像對,也就是匹配基線(Baseline)較短的影像對,解算其變形量後,再轉換成整體的變形時序(圖2)。一般基線可以分成空間基線(Perpendicular Baseline)與時間基線(Temporal Baseline),前者係指衛星再次繞行至同一位置時,其前後兩次的軌道偏差量,而後者則是不同期影像的取得時間差異,即為圖2橫軸之間的差異。
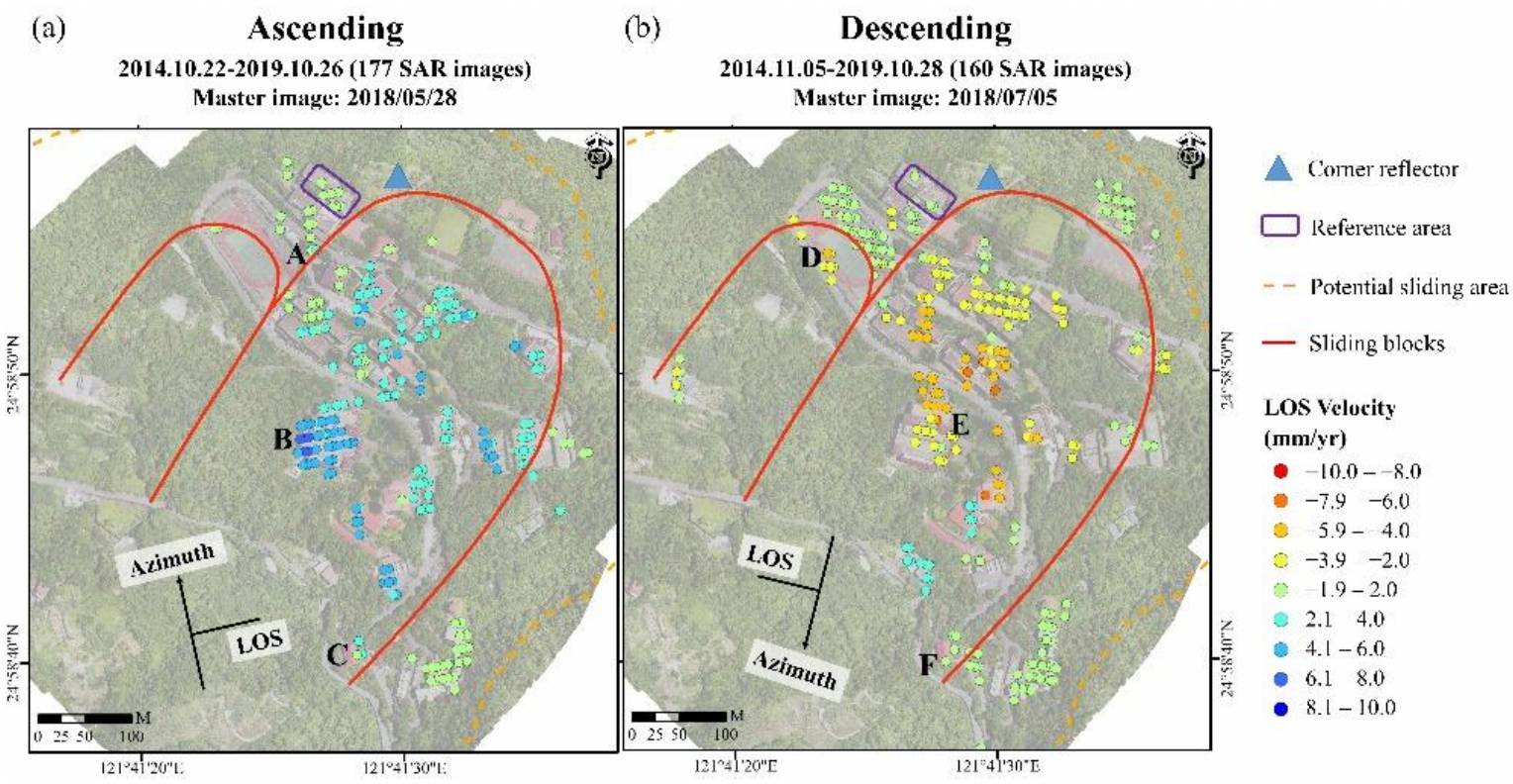
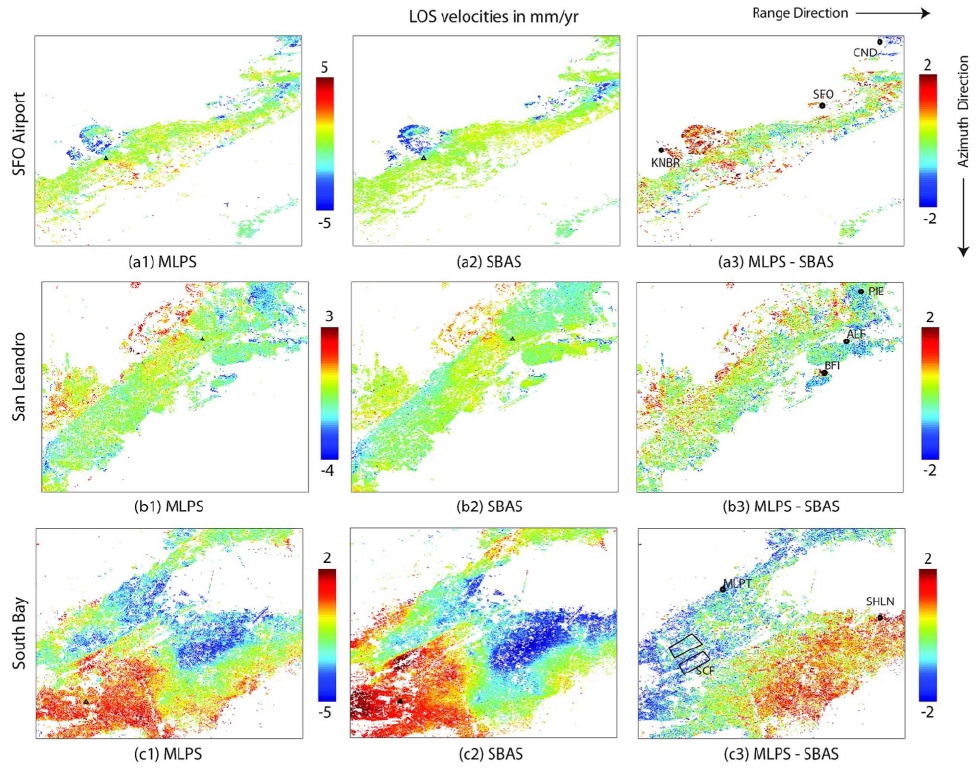
先前的電子報曾提過,PS點係指在多時期的雷達影像中,具有穩定且強烈反射訊號的像素,基本上為空間上變動緩慢的點。滿足上述條件的PS點多半是都會區的人工構造物,在山區相對而言較為稀疏,甚至不存在(圖3)。為了補足山區監測資料的不足,有時會加裝角反射器(圖4),以利其在後續的雷達影像計算中被視為PS點,得以提供監測所需的位移資訊。至於SBAS-InSAR,其目的在於消除不同影像時、空間基線差異,以增加干涉的成功率與精準度(Shanker et al., 2011,圖5)。換言之,透過SBAS進行解算,有機會篩選出更多的資料點,為PS點不足的區域提供替代方案(吳笙緯,2019)。

一般而言,坡地在發生破壞前會有明顯加速變形的現象,平時則是緩慢潛變或等速變形。而上節提到的多時域雷達干涉技術(MT-InSAR),可以解析出變形量的時序,也就能應用於邊坡監測。在今(2024)年的測量研討會中,有學者提到InSAR多時序資料搭配INV(Inverse Velocity method)的方法,可以有效地應用於坡地監測,預測崩塌發生的時間(Carlà et al., 2017;Grebby et al., 2021)。
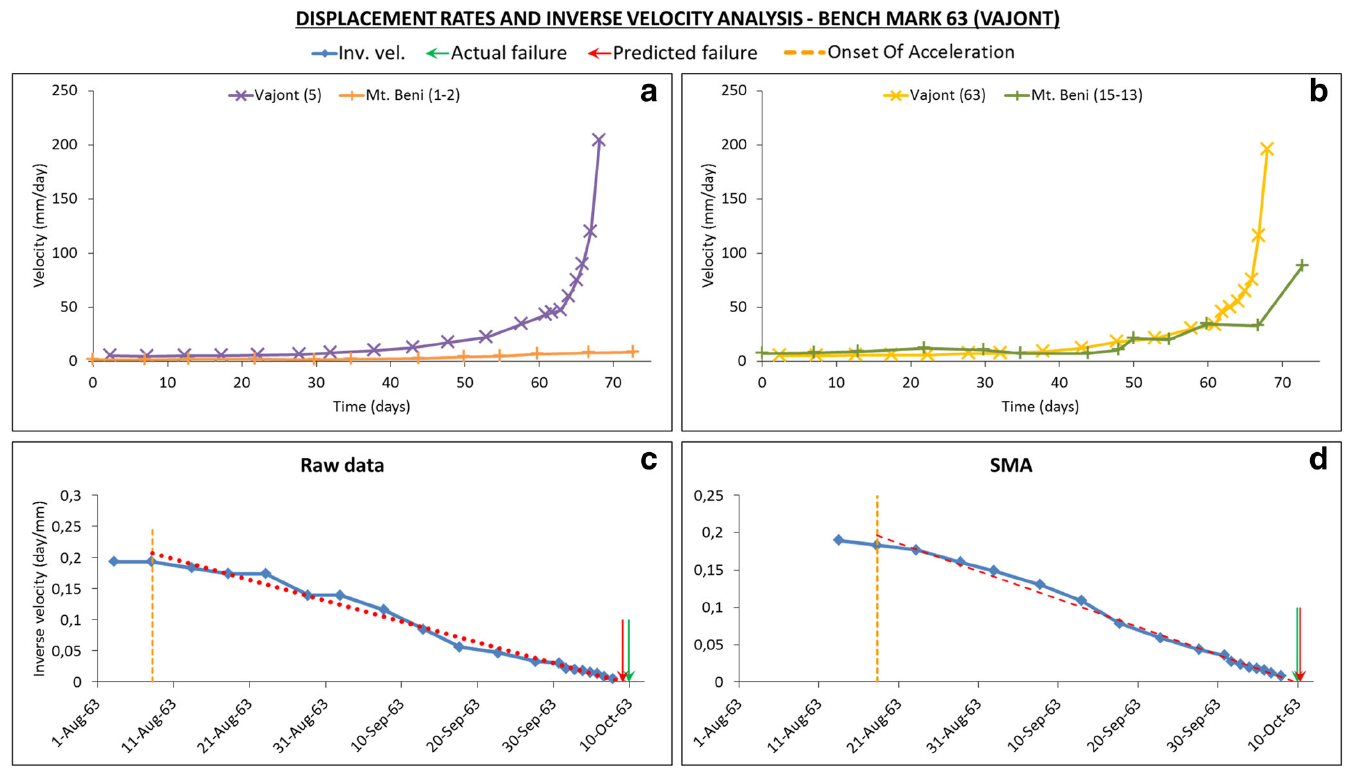
INV法是將觀測點移動速度以倒數形式呈現,並定義速度倒數為0時代表邊坡發生破壞。當一邊坡開始滑移,最終進入加速破壞的階段,其反映在速度的倒數上,就會呈現數值遞減至趨近於零的線性趨勢。所以若目標邊坡的變形行為屬於上述的破壞類型(圖6),就能利用速度倒數法所迴歸的線性公式,推估發生破壞的時間點(圖6c、6d),提前規劃相關因應措施。在應用INV法時,通常會選擇適用的公式將資料平滑化,如圖6d就是將圖6c的原始資料,利用SMA(Small Moving Average)─移動視窗平均法─的方式平滑,得到更準確的預測成果。
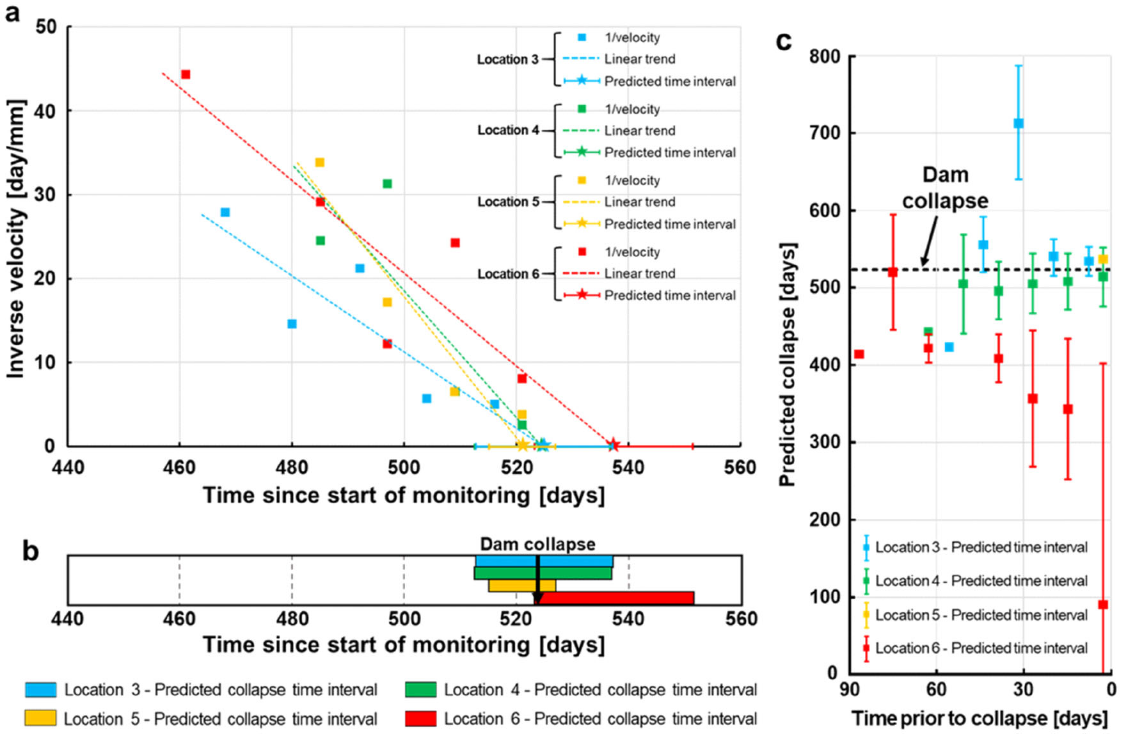
Grebby等人(2021)就利用SBAS-InSAR技術得到巴西一礦場在2017年至2019年的多時序變形量,進一步將其換算成速度的時間序列後,套用INV的方法分析該礦場於2019年的崩塌事件。結果顯示由InSAR解析的多時序位移搭配INV法確實具有預測崩塌發生的潛力(圖7),在4個觀測的位置中,有3處觀測資料的迴歸趨勢吻合崩塌發生的時間。
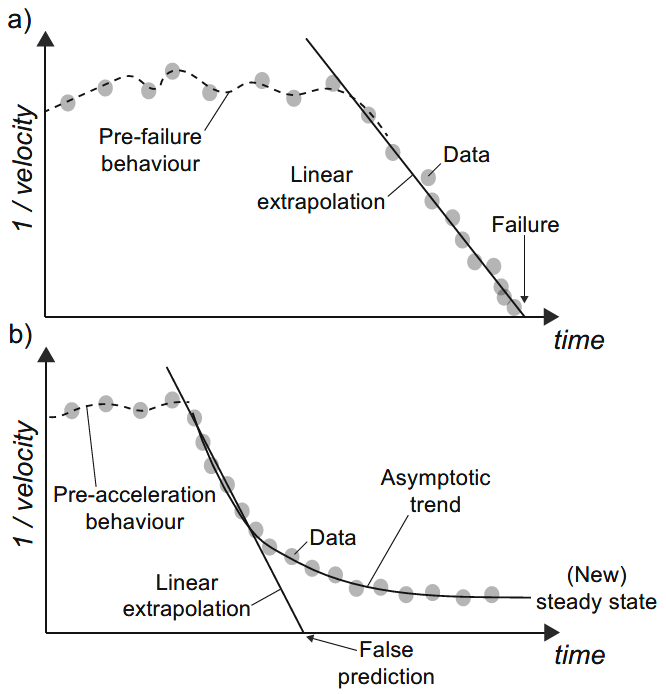
不過INV法也有其使用上的限制,如:邊坡破壞歷程不屬於加速至破壞的類別,INV法就不適用(圖8)。而在測量研討會中,講者提到INV法在應用時,需特別濾除非直接與邊坡破壞有關的位移量變化,如季節性交替造成的週期性變形。Carlà等人(2017)也指出資料雜訊對最後的預測結果具有一定影響,因此選擇適合的資料平滑化方式對於INV法的應用相當重要。
在目前MT-InSAR方法中,PS-InSAR較適用於具有明顯反射訊號的區域,如都會區或特定橋梁、鐵公路系統;而對於PS點不足的區域,SBAS-InSAR可提供另一替代方案。另一方面,將InSAR的多時序資料套用INV法分析坡面崩塌發生時間,可以快速而有效地掌握邊坡位移的歷程,不過需注意其條件限制,包括坡面破壞型態及資料平滑方式。若能搭配其他資料,如:現地的GNSS、傾斜儀等,補足InSAR資料沒有涵蓋到的時間區段,將大幅提升監測的效力,並讓我們對於邊坡的變形機制有更多的認識。
Shanker, P., Casu, F., Zebker, H. A., and Lanari, R. (2011). Comparison of persistent scatterers and small baseline time-series InSAR results: A case study of the San Francisco bay area. IEEE Geoscience and Remote Sensing Letters, 8(4), 592-596. doi: 10.1109/LGRS.2010.2095829.
Carlà, T., Intrieri, E., Di Traglia, F., Nolesini, T., Gigli, G., and Casagli, N. (2017). Guidelines on the use of inverse velocity method as a tool for setting alarm thresholds and forecasting landslides and structure collapses. Landslides, 14, 517–534. https://doi.org/10.1007/s10346-016-0731-5.
Carlà, T., Macciotta, R., Hendry, M., Martin, D., Edwards, T., Evans, T., Farina, P., Intrieri, E., and Casagli, N. (2018). Displacement of a landslide retaining wall and application of an enhanced failure forecasting approach. Landslides, 15, 489–505. https://doi.org/10.1007/s10346-017-0887-7.
Grebby, S., Sowter, A., Gluyas, J., Toll, D., Gee, D., Athab, A., and Girindran, R. (2021). Advanced analysis of satellite data reveals ground deformation precursors to the Brumadinho Tailings Dam collapse. Communications Earth and Environment, 2(1), 2.
Li, S., Xu, W., and Li, Z. (2022). Review of the SBAS InSAR Time-series algorithms, applications, and challenges. Geodesy and Geodynamics, 13(2), 114-126.
吳笙緯(2019)。應用短基線集干涉技術探討六龜地區地表形變。國立交通大學土木工程學系,碩士論文,共77頁。
呂喬茵、劉哲欣、李士強、張志新(2021)。多時域雷達干涉技術 (MTInSAR) 於潛移型山崩之監測應用。國家災害防救科技中心110年度成果發表會海報。
創聚-InSAR多時序位移示意
水利署電子報-MT-InSAR應用
台灣世曦-角反射器
Berardino, P., Fornaro, G., Lanari, R., and Sansosti, E. (2002). A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Transactions on geoscience and remote sensing, 40(11), 2375-2383.
范凱婷(2012)。台北盆地及周圍山區之現今地表變形研究。國立中央大學地球物理研究所,碩士論文,共102頁。
努巴迪(2021)。Parametric Study of the PS- and SBAS- InSAR Processing for Landslide Monitoring – Ali-Shan as Case Study。國立中央大學土木工程學系,碩士論文,共131頁。